
M2QA0.37-2P M2QA0.55-2P M2QA0.75-2P M2QA1.1-2P
M2QA1.5-2P M2QA2.2-2P M2QA3-2P M2QA4-2P
M2QA5.5-2P M2QA7.5-2P M2QA11-2P M2QA15-2P
M2QA18.5-2P M2QA22-2P M2QA30-2P M2QA37-2P
M2QA45-2P M2QA55-2P M2QA75-2P M2QA90-2P
M2QA110-2P M2QA132-2P M2QA160-2P M2QA200-2P
M2QA250-2P M2QA315-2P M2QA0.25-4P M2QA0.37-4P
M2QA0.55-4P M2QA0.75-4P M2QA1.1-4P M2QA1.5-4P
M2QA2.2-4P M2QA3-4P M2QA4-4P M2QA5.5-4P M2QA7.5-4P
M2QA11-4P M2QA15-4P M2QA18.5-4P M2QA22-4P
M2QA30-4P M2QA37-4P M2QA45-4P M2QA55-4P M2QA75-4P
M2QA90-4P M2QA110-4P M2QA132-4P M2QA160-4P
M2QA200-4P M2QA250-4P M2QA315-4P M2QA0.18-6P
M2QA0.25-6P M2QA0.37-6P M2QA0.55-6P
M2QA0.75-6P M2QA1.1-6P M2QA1.5-6P M2QA2.2-6P
M2QA3-6P M2QA4-6P M2QA5.5-6P M2QA7.5-6P
M2QA11-6P M2QA15-6P M2QA18.5-6P M2QA22-6P
M2QA30-6P M2QA37-6P M2QA45-6P M2QA55-6P
M2QA75-6P M2QA90-6P M2QA110-6P M2QA132-6P
M2QA160-6P M2QA200-6P M2QA250-6P
M2QA0.18-8P M2QA0.25-8P M2QA0.37-8P M2QA0.55-8P
M2QA0.75-8P M2QA1.1-8P M2QA1.5-8P M2QA2.2-8P
M2QA3-8P M2QA4-8P M2QA5.5-8P M2QA7.5-8P
M2QA11-8P M2QA15-8P M2QA18.5-8P M2QA22-8P
M2QA30-8P M2QA37-8P M2QA45-8P M2QA55-8P
M2QA75-8P M2QA90-8P M2QA110-8P M2QA132-8P
M2QA160-8P M2QA200-8P

M2QA71M2A M2QA71M2B M2QA80M2A M2QA80M2B
M2QA90S2A M2QA90L2A M2QA100L2A M2QA112M2A
M2QA132S2B M2QA160M2A M2QA160M2B M2QA160L2A
M2QA160L2B M2QA180M2A M2QA200L2A M2QA200L2B
M2QA225M2A M2QA250M2A M2QA280S2A M2QA280M2A
M2QA315S2A M2QA315M2A M2QA315L2A M2QA315L2B
M2QA355M2A M2QA355L2A
M2QA71M4A M2QA71M4B M2QA80M4A M2QA80M4B
M2QA90S4A M2QA90L4A M2QA100L4A M2QA112M4A
M2QA132S4B M2QA160M4A M2QA160M4B
M2QA160L4A
M2QA160L4B M2QA180M4A M2QA200L4A M2QA200L4B
M2QA225M4A M2QA250M4A M2QA280S4A M2QA280M4A
M2QA315S4A M2QA315M4A M2QA315L4A M2QA315L4B
M2QA71M6A M2QA71M6B M2QA80M6A M2QA80M6B
M2QA90S6A M2QA90L6A M2QA100L6A M2QA112M6A
M2QA132S6B M2QA160M6A M2QA160M6B M2QA160L6A
M2QA160L6B M2QA180M6A M2QA200L6A M2QA200L6B
M2QA225M6A M2QA250M6A M2QA280S6A M2QA280M6A
M2QA315S6A M2QA315M6A M2QA315L6A M2QA315L6B
M2QA355M6A M2QA355L6A
M2QA71M8A M2QA71M8B M2QA80M8A M2QA80M8B
M2QA90S8A M2QA90L8A M2QA100L8A M2QA112M8A
M2QA132S8B M2QA160M8A M2QA160M8B M2QA160L8A
M2QA160L8B M2QA180M8A M2QA200L8A M2QA200L8B
M2QA225M8A M2QA250M8A M2QA280S8A M2QA280M8A
M2QA315S8A M2QA315M8A M2QA315L8A M2QA315L8B
M2QA355M8A M2QA355L8A
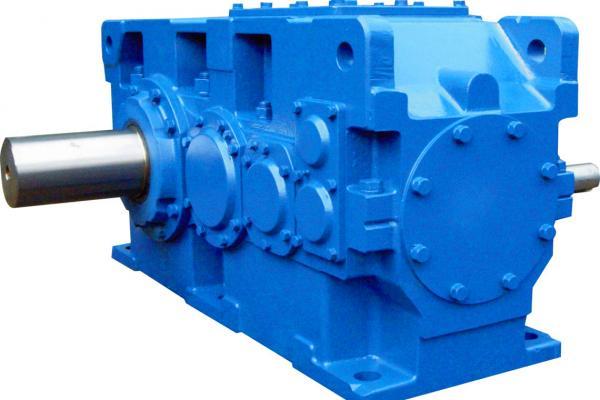
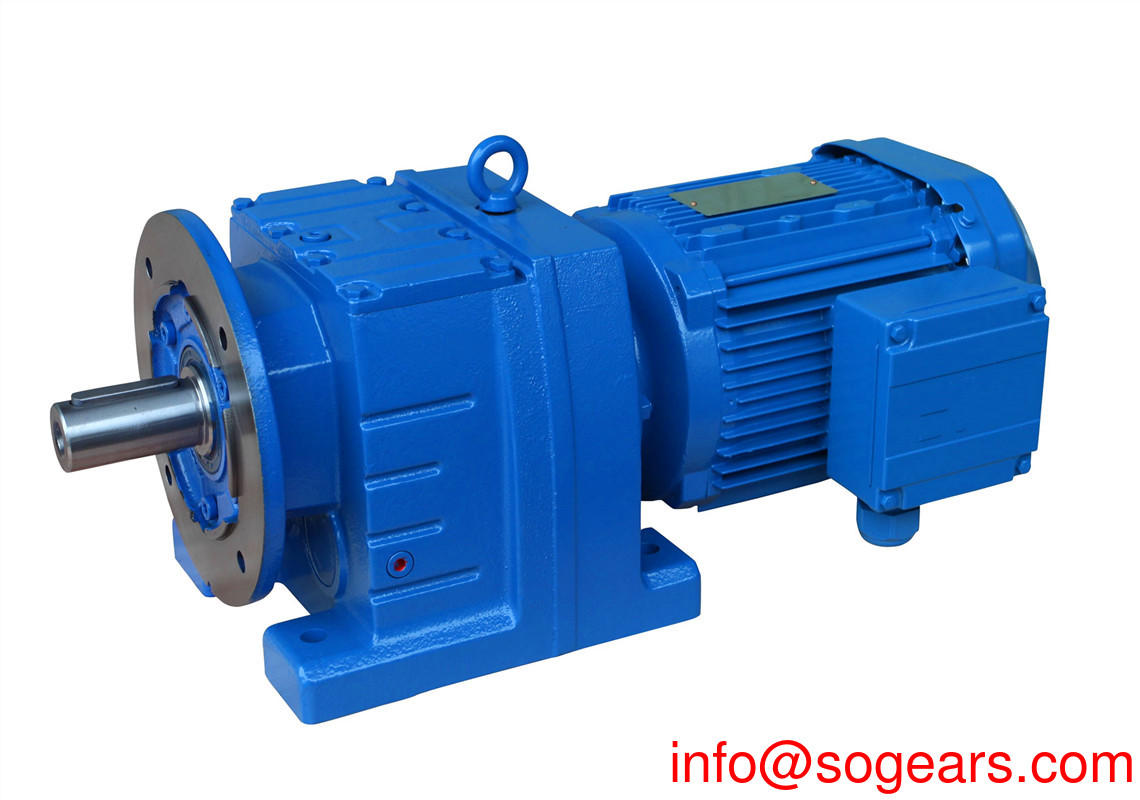
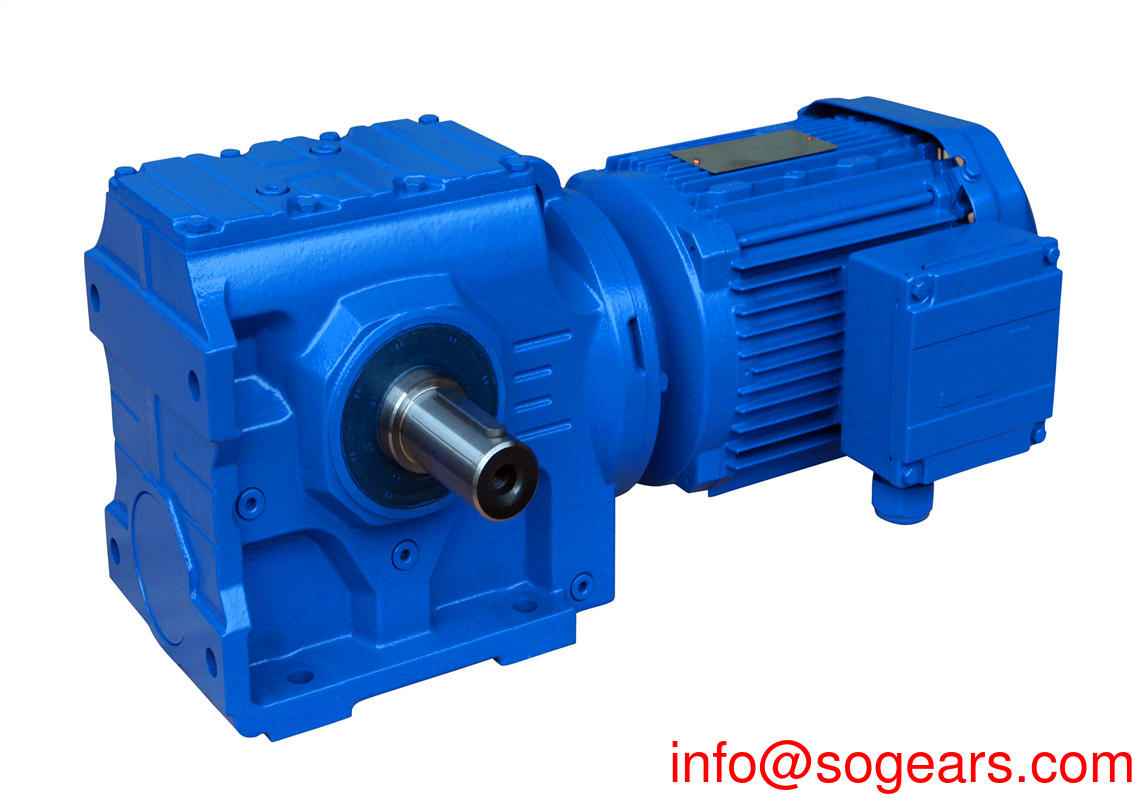
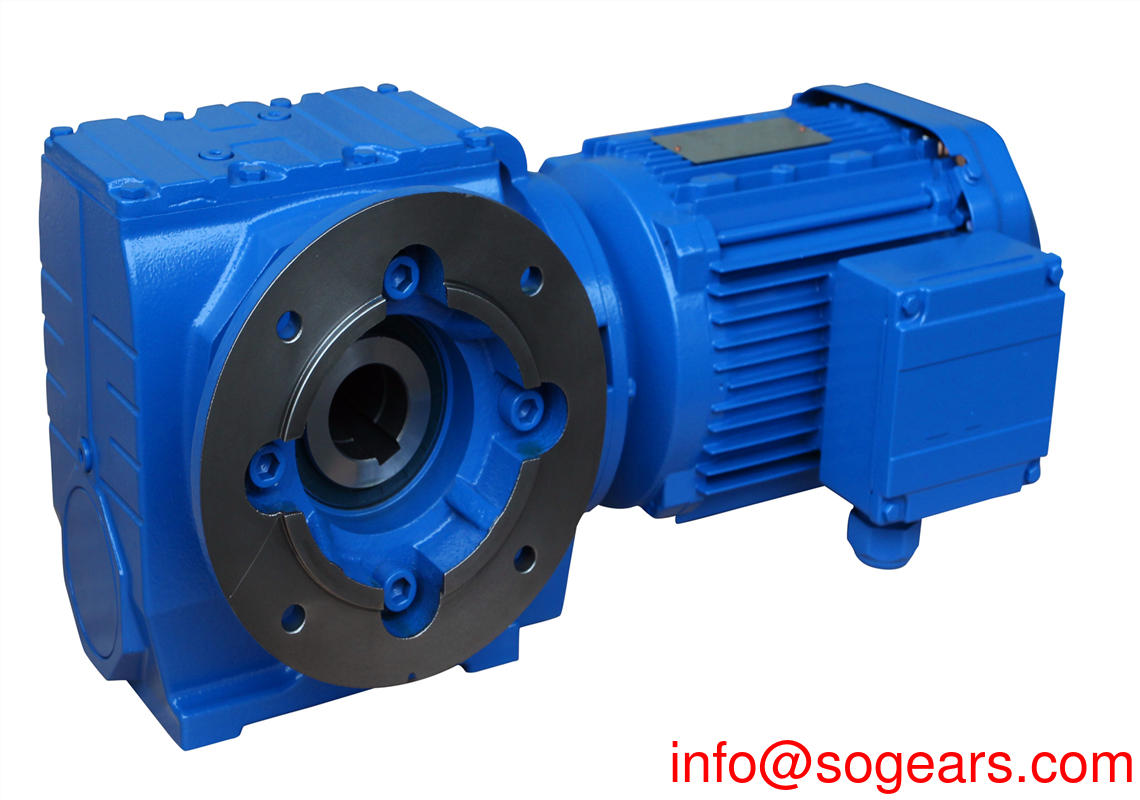
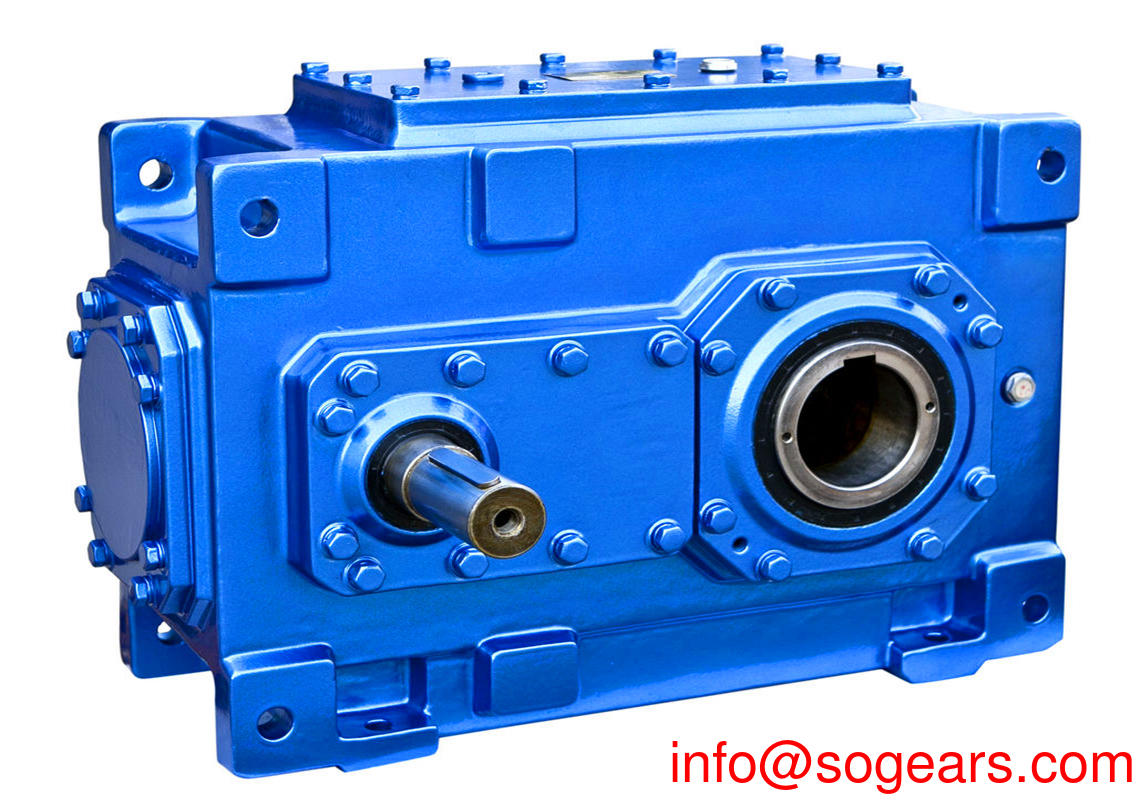
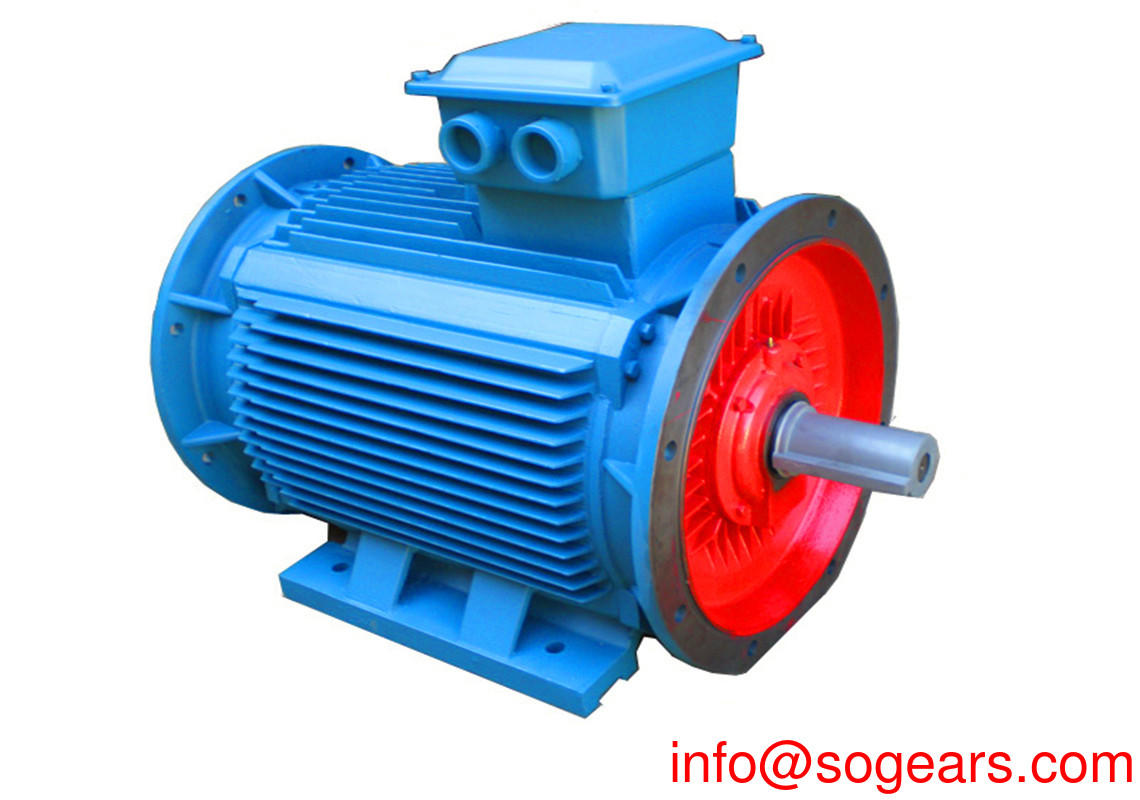
Los motores asíncronos trifásicos marinos de la serie M2QA son los equipos mecánicos marinos de última generación de la serie M2000 de ABB Motor Company. La carcasa exterior está hecha de hierro fundido de alta resistencia para evitar daños secundarios. Después de un diseño y fabricación especiales, con alta eficiencia, par de arranque y otras ventajas, adecuados para todo tipo de accionamiento de maquinaria marina, tales como: bombas, ventiladores, separadores, maquinaria hidráulica, equipos auxiliares y requisitos similares de otros equipos marinos. El motor está diseñado en estricta conformidad con GB755 "clasificación y rendimiento del motor giratorio" y el código ZC "para la construcción de barcos de acero en alta mar", y ha sido aprobado por la Oficina Estatal de Inspección de Buques y ha obtenido el tipo de Sociedad de Clasificación de China certificado de aprobación Al mismo tiempo, cumple con ABS, BV, DNV, GL, IEC, KR, LR, NK y otras normas internacionales y especificaciones de la sociedad de clasificación relacionadas.
1. El motor cumple con los siguientes estándares Comisión Electrotécnica Internacional IEC34, IEC72 Norma australiana AS1359-2 Norma británica BS4999-5000 La norma alemana Din42673 cumple con la solicitud de la marca "CE" de la Comunidad Europea, el motor cumple con GB755 (idt IEC 60034-1, GB10069 Neq IEC 60034-9, Q / JBQS282, rendimiento superior del motor bajo ruido, baja vibración, a través del diseño optimizado y la mejora artesanal, el motor de la serie M2QA-H en el ruido, la vibración se ha reducido enormemente y alcanza el nivel avanzado internacional Nivel de protección de alto rendimiento, el nivel de protección de diseño estándar del motor IP55, de acuerdo con los requisitos del cliente para proporcionar un mayor nivel de protección. Es adecuado para un voltaje amplio. El diseño del motor tiene en cuenta la variación de voltaje de diferentes regiones, de modo que El motor se puede utilizar en muchas regiones y se puede garantizar el rendimiento del usuario. El grado de aislamiento aumenta y la vida útil del motor es prolongada. re. El motor estándar adopta la estructura de aislamiento de grado F, por lo tanto, la vida útil del motor y la confiabilidad del motor aumentan. Alta eficiencia, el motor utiliza el diseño de optimización, tiene la alta eficiencia, puede producir el notable efecto de conservación de energía. 3, el motor de transmisión puede ser polea, engranaje recto o accionamiento de acoplamiento elástico. 4. La superficie de los devanados y las partes metálicas del motor están pintadas y tratadas de acuerdo con los requisitos del motor higrotérmico. El motor tiene un buen rendimiento a prueba de humedad, a prueba de moho y niebla salina después de una pintura y tratamiento especiales. Condiciones de servicio: Altitud 0M temperatura del anillo en-25 ° c-50 ° C humedad relativa del aire: no más del 95% de condensación: NIEBLA DE SAL: Niebla de aceite: Molde: IMPACTO: Vibración: 22.5 grados de inclinación: voltaje, frecuencia y modo de operación 380V (50HZ) Modo de operación 440V (60HZ): Rodamientos continuos (S1): rodamientos NSK, Japón, si los usuarios necesitan un voltaje de trabajo específico, se pueden suministrar de acuerdo con requisitos especiales.

El motor de frecuencia variable se refiere al motor que funciona continuamente en condiciones ambientales estándar con una carga nominal del 100% dentro del rango de velocidad nominal del 10% ~ 100%, y el aumento de temperatura no excede el valor permitido de calibración del motor.
Con el rápido desarrollo de la tecnología electrónica de potencia y los nuevos dispositivos semiconductores, la tecnología de regulación de velocidad de CA se ha mejorado y mejorado constantemente, y el inversor ha mejorado gradualmente con su buena forma de onda de salida, se ha utilizado ampliamente una excelente relación de rendimiento en máquinas de CA. Por ejemplo: el acero utilizado para rodar motores grandes y motores eléctricos medianos y pequeños, tránsito ferroviario y ferroviario urbano con motor de tracción, elevador, equipo de elevación de contenedores con motor de elevación, bomba de agua y ventilador con motor, compresor, electrodomésticos, deben usarse motor de regulación de velocidad de frecuencia variable ac, y ha obtenido el buen efecto [1]. El uso del motor regulador de velocidad de frecuencia variable de CA tiene ventajas obvias sobre el motor regulador de velocidad de CC:
(1) regulación de velocidad fácil y ahorro de energía.
(2) estructura simple del motor de corriente alterna, pequeño tamaño, pequeña inercia, bajo costo, fácil mantenimiento, duradero.
(3) la capacidad se puede ampliar para lograr una operación de alta velocidad y alto voltaje.
(4) se puede realizar un arranque suave y un frenado rápido.
(5) sin chispa, a prueba de explosiones, fuerte adaptabilidad al medio ambiente. [1]
En los últimos años, el dispositivo de accionamiento de regulación de velocidad de frecuencia variable se ha desarrollado a una tasa de crecimiento anual de 13% -16%, y ha reemplazado gradualmente a la mayoría del dispositivo de accionamiento de regulación de velocidad de CC. Debido a que el motor asíncrono común que funciona con frecuencia constante y fuente de alimentación de voltaje constante tiene una gran limitación cuando se aplica al sistema de regulación de velocidad de frecuencia variable, el motor de CA de frecuencia variable especial que está diseñado de acuerdo con la ocasión de uso y el requisito de uso ha sido desarrollado en el extranjero. Por ejemplo, hay motores para bajo ruido y baja vibración, motores para mejorar las características de par de baja velocidad, motores para alta velocidad, motores con generador de medición de velocidad y motores de control vectorial, etc. [1].
Edición del principio de construcción
Cuando la tasa de deslizamiento cambia poco, la velocidad es proporcional a la frecuencia, se puede ver que cambiar la frecuencia de potencia puede cambiar la velocidad del motor asíncrono. En la regulación de la velocidad de conversión de frecuencia, la esperanza total de que el flujo magnético principal permanezca sin cambios. Si el flujo magnético principal es mayor que el flujo magnético en funcionamiento normal, el circuito magnético está sobresaturado y la corriente de excitación aumenta y el factor de potencia disminuye. Si el flujo magnético principal es menor que el flujo magnético en funcionamiento normal, el par motor disminuye [1].
Editor de proceso de desarrollo
El sistema de conversión de frecuencia del motor actual se usa principalmente con un sistema de control de V / F constante, este sistema de control de conversión de frecuencia se caracteriza por una estructura simple, producción barata. Este sistema es ampliamente utilizado en el ventilador y otros grandes y para el rendimiento dinámico del sistema no son requisitos muy altos. Este sistema es un sistema de control de circuito abierto típico, que puede cumplir con los requisitos de la velocidad uniforme de la mayoría de los motores, pero para un rendimiento dinámico y estático limitado, no se puede aplicar a los requisitos de rendimiento dinámico y estático que son más estrictos. Para lograr un alto rendimiento de la regulación dinámica y estática, solo podemos usar el sistema de control de circuito cerrado para lograrlo. Entonces, algunos investigadores presentaron el control de frecuencia de deslizamiento en bucle cerrado del modo de control de velocidad del motor, esta forma de ajuste de velocidad para lograr un alto rendimiento en velocidad estática y dinámica, pero el sistema solo se ha aplicado en la velocidad del motor es lento, porque cuando la velocidad del motor es más alto, el sistema no logrará el propósito de ahorrar electricidad, también puede hacer que la corriente transitoria del motor sea grande, hace que el par del motor cambie en un instante. Por lo tanto, para lograr un alto rendimiento dinámico y estático a alta velocidad, solo para resolver el problema de la corriente transitoria generada por el motor, solo para resolver este problema de manera razonable, podemos desarrollar mejor la tecnología de control de ahorro de energía de la frecuencia del motor. [2]
Editor de características principales
El motor especial de conversión de frecuencia tiene las siguientes características:
Diseño de aumento de temperatura de clase B, fabricación de aislamiento de clase F. El uso de materiales de aislamiento de polímeros y el proceso de fabricación de pintura a presión de vacío y el uso de una estructura de aislamiento especial, de modo que la resistencia del voltaje del aislamiento del devanado eléctrico y la resistencia mecánica se hayan mejorado considerablemente, lo suficiente como para ser calificados para el funcionamiento del motor de alta velocidad y la resistencia al convertidor de frecuencia Choque de corriente de alta frecuencia y daños de tensión al aislamiento.
La alta calidad de equilibrio, el nivel de vibración para el procesamiento de piezas de máquina de alta precisión de clase R (nivel de reducción de vibración) y el uso de rodamientos especiales de alta precisión pueden funcionar a alta velocidad.
Ventilación forzada y sistema de disipación de calor, todo el ventilador axial importado ultra silencioso, alta vida, fuerte viento. Asegúrese de que el motor a cualquier velocidad, obtenga una disipación de calor efectiva, pueda lograr una operación a largo plazo a alta o baja velocidad.
El motor de la serie YP diseñado por el software AMCAD tiene una gama más amplia de regulación de velocidad y una mayor calidad de diseño en comparación con el motor de conversión de frecuencia tradicional. Con una amplia gama de características de regulación de velocidad constante de par y potencia, la regulación de velocidad es estable, sin fluctuación de par.
Tiene una buena coincidencia de parámetros con todo tipo de convertidores de frecuencia y puede realizar un par completo de velocidad cero, un par grande de baja frecuencia, control de velocidad de alta precisión, control de posición y control de respuesta dinámica rápida. El motor especial de frecuencia variable de la serie YP se puede utilizar para preparar el freno, el suministro del codificador, de modo que pueda obtener una parada precisa, y a través del control de circuito cerrado de velocidad para lograr un control de velocidad de alta precisión.
El control preciso de la regulación de velocidad continua super baja velocidad se realiza mediante el uso de "reductor + inversor motor especial + codificador + inversor". El motor especial de conversión de frecuencia de la serie YP tiene buena universalidad, su tamaño de instalación se ajusta al estándar IEC y tiene la capacidad de intercambio con el motor estándar general.
Editor de daños de aislamiento del motor
En la popularización y aplicación de motores de conversión de frecuencia de CA, una gran cantidad de motores de regulación de velocidad de conversión de frecuencia de CA sufrieron daños tempranos en el aislamiento. Muchos motores de conversión de frecuencia de CA tienen una vida útil de solo 1 ~ 2 años, algunos solo unas pocas semanas, incluso en la operación de prueba del daño del aislamiento del motor, y generalmente ocurren entre aislamiento de vueltas, lo que presenta un nuevo tema para la tecnología de aislamiento del motor. La práctica ha demostrado que la teoría del diseño de aislamiento del motor bajo voltaje de onda sinusoidal de frecuencia de potencia desarrollada en las últimas décadas no se puede aplicar al motor regulador de velocidad de frecuencia variable de CA. Es necesario estudiar el mecanismo de daño del aislamiento de los motores de conversión de frecuencia, establecer la teoría básica del diseño de aislamiento de los motores de conversión de frecuencia de CA y establecer el estándar industrial de los motores de conversión de frecuencia de CA.
Daño al cable electromagnético
1.1 descarga parcial y carga espacial
En la actualidad, el inversor IGB T (diodo de compuerta aislado) PWM (Impulso de ancho de pulso n- Modulación de ancho de pulso) se utiliza para controlar el motor de CA. Su rango de potencia es de aproximadamente 0.75 ~ 500kW. La tecnología IGBT puede proporcionar un tiempo de subida extremadamente corto de la corriente, su tiempo de subida en 20 ~ 100 s, el pulso eléctrico resultante tiene una frecuencia de conmutación muy alta, hasta 20 KHZ. Cuando se aplica un voltaje de borde ascendente rápidamente desde el inversor al extremo del motor, se genera una onda de voltaje reflejada debido a la falta de coincidencia de impedancia entre el motor y el cable. Esta onda de reflexión regresa al inversor e induce otra onda de reflexión debido a la falta de coincidencia de impedancia entre el cable y el convertidor que se aplicará a la onda de voltaje original, produciendo así un voltaje pico en el frente de la onda de voltaje. El voltaje pico depende del tiempo de subida del voltaje del pulso y la longitud del cable [1].
Generalmente, cuando la longitud del cable aumenta, ambos extremos del cable producen sobretensión. La amplitud de la sobretensión en el extremo del motor aumenta con la longitud del cable y tiende a saturarse. Sin embargo, la sobretensión en el extremo de potencia es menor que la del extremo del motor y es casi independiente de la longitud del cable. Los resultados muestran que la sobretensión se genera en los bordes ascendente y descendente de la tensión, y se produce la oscilación de atenuación. Hay dos tipos de forma de onda de pulso PWM, uno es la frecuencia de conmutación. La frecuencia de repetición del voltaje pico es proporcional a la frecuencia de conmutación. La otra es la frecuencia básica, que controla directamente la velocidad del motor. Al comienzo de cada frecuencia fundamental, las polaridades del pulso varían de positivo a negativo o de negativo a positivo. En este momento, el aislamiento del motor está sujeto a un voltaje de amplitud completa dos veces el valor del voltaje pico. Además, en un motor trifásico embebido disperso, la polaridad del voltaje entre dos vueltas adyacentes de diferentes fases puede ser diferente, y el salto del voltaje de amplitud completa puede ser el doble del valor de un voltaje pico. Según la prueba, la forma de onda del voltaje de salida del convertidor PWM, en el sistema de CA de 380 / 480v, el voltaje pico medido en el extremo del motor es 1.2 ~ 1.5kv, mientras que en el sistema de CA de 576 / 600v, el voltaje pico medido alcanza 1.6 ~ 1.8kv. Es obvio que la descarga parcial de superficie ocurre entre devanados bajo el voltaje de amplitud completa. Debido a la ionización, se genera una carga espacial en el entrehierro, formando así un campo eléctrico inducido opuesto al campo eléctrico aplicado. Cuando la polaridad del voltaje cambia, este campo eléctrico inverso está en la misma dirección que el campo eléctrico aplicado. De esta forma, se genera un campo eléctrico más alto, lo que conducirá a un aumento en el número de descargas parciales y eventualmente a una falla. La prueba muestra que la descarga eléctrica que actúa sobre el aislamiento entre estas vueltas depende del rendimiento específico del cable y del tiempo de subida de la corriente del variador PWM. Si el tiempo de subida es inferior a 0.1s, se agregará el 80% del potencial a las dos primeras vueltas del devanado, es decir, cuanto más corto sea el tiempo de subida, mayor será la descarga eléctrica y menor será la vida útil del El aislamiento entre las vueltas [1].
1.2 pérdida media y calentamiento
Cuando E excede el valor crítico del aislante, la pérdida dieléctrica aumenta rápidamente. Cuando la frecuencia aumenta, la descarga parcial aumenta, lo que produce calor, lo que provoca una mayor corriente de fuga, lo que hace que el Ni aumente más rápido, es decir, la temperatura del motor aumenta y el aislamiento envejece más rápido. En resumen, se debe a la descarga parcial anterior, el calentamiento dieléctrico, la inducción de carga espacial y otros factores que causan daños prematuros de la línea electromagnética en el motor de frecuencia variable [1].
Daño al aislamiento principal, aislamiento de fase y pintura aislante
Como se mencionó anteriormente, el uso de la fuente de alimentación de frecuencia variable PWM aumenta la amplitud de la tensión oscilante en el terminal del motor de frecuencia variable. Por lo tanto, el aislamiento principal, el aislamiento de fase y la pintura de aislamiento del motor están sujetos a una mayor intensidad de campo eléctrico. Según la prueba, debido a la influencia integral del tiempo de aumento del voltaje de salida del inversor, la longitud del cable y la frecuencia de conmutación, el voltaje máximo del terminal anterior puede exceder los 3 kV. Además, cuando se produce una descarga parcial entre los devanados del motor, la energía eléctrica almacenada por la capacitancia distribuida en el aislamiento se transformará en calor, radiación, energía mecánica y química, para degradar todo el sistema de aislamiento y reducir la descomposición. voltaje del aislamiento, y eventualmente conducir a la ruptura del sistema de aislamiento.









































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}