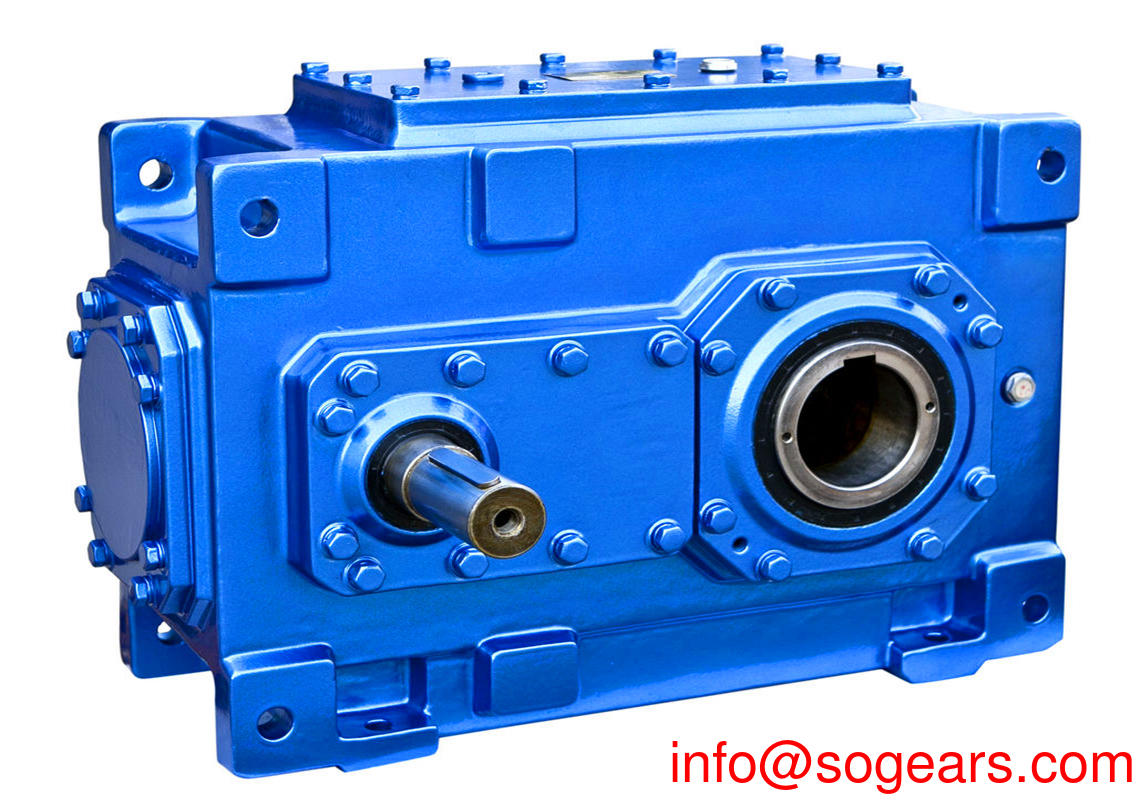
Motores de engranajes cónicos

Motor de engranaje cónico helicoidal de ángulo recto
1.Nuestras especificaciones del motor con engranaje cónico helicoidal de ángulo recto en el motor de engranaje cónico en espiral de la serie T, caja de aluminio Esparcidor de estiércol Caja de engranajes cónicos agrícolas,
Nuestro motor de engranaje cónico helicoidal en ángulo recto Modo de entrada: brida de conexión del motor, entrada del eje Motor de engranaje cónico helicoidal en ángulo recto
Nuestro reductor de motor de engranaje cónico helicoidal de ángulo recto adopta el proyecto de diseño general, que puede convertirlos en especiales para industrias Nuestro motor de engranaje cónico helicoidal de ángulo recto de acuerdo con los diferentes requisitos de los clientes.
El modelo de utilidad revela un motor de engranaje cónico helicoidal de ángulo recto de tres etapas, que incluye:Brida de entrada, a través del primer tornillo conectado con la brida de entrada de la corona del anillo interior, a través del segundo tornillo y el anillo de engranaje conectado la salida de la brida, se establece entre la brida de entrada y la brida de transición del anillo de engranaje, se establece Al escribir en el cojinete de la brida de transición el eje de entrada, un extremo del eje de entrada descrito en la brida de entrada y referido al otro extremo del eje de entrada en el eje conectado con el nivel del anillo del engranaje solar, es un juego de ruedas de primera clase con el sol alrededor del sol, como se describe en la primera vuelta del sol y algún nivel de engranajes planetarios que se engranan entre sí, como se describe dentro del primer engranaje planetario y engranaje de anillo que se engranan entre sí,El engranaje planetario de una etapa está dispuesto en el eje del pasador del engranaje planetario de una etapa al rodar un rodamiento de pasador de rodillo completo de una etapa, y un extremo del eje del pasador del engranaje planetario de una etapa se extiende y se conecta con el eje de una etapa bastidor de engranaje planetario.

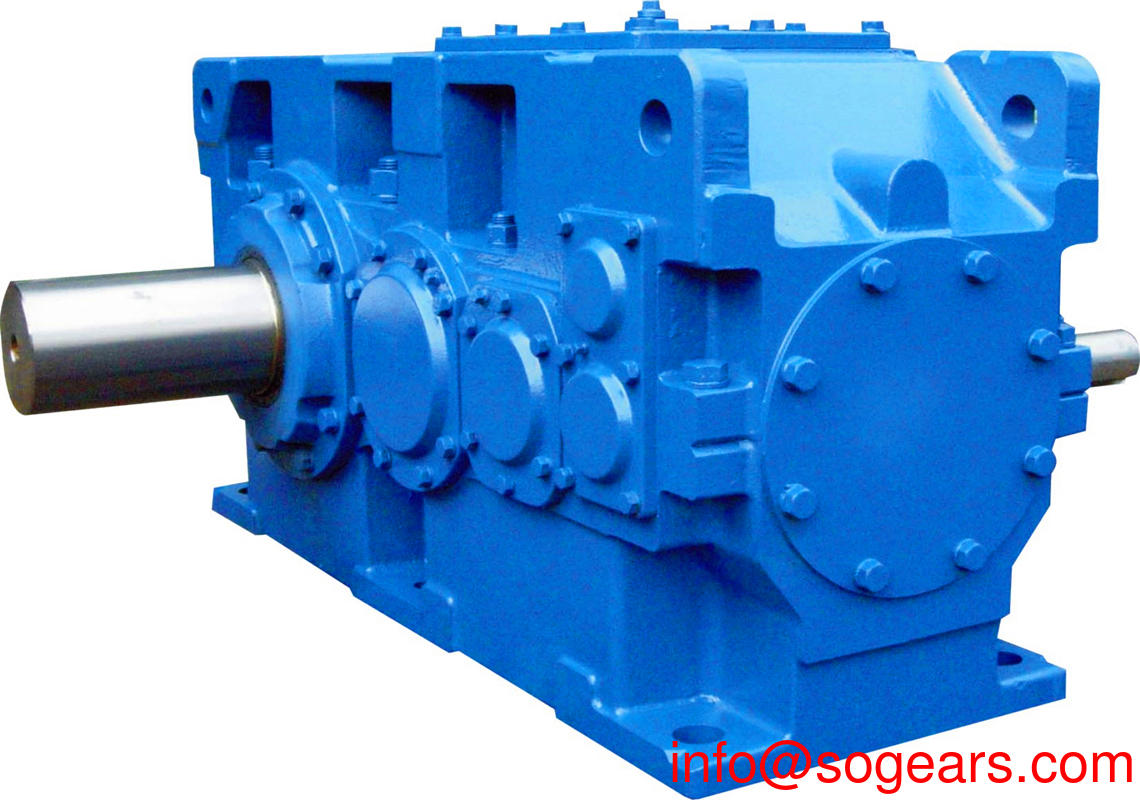
Motor de engranaje cónico helicoidal de tres ángulos rectos
1. Motorreductor cónico helicoidal de ángulo recto de nivel 3, cuyo carácter es: incluyendo: brida de entrada, a través del primer tornillo con el método de entrada fase I del anillo de engranaje, por el segundo tornillo y anillo de engranaje interno la salida de la brida de conexión en, se pierde en la brida con la corona colocada entre la brida de transición, es la brida de transición en el rodamiento de entrada que establece el eje de entrada, descrito en el eje de entrada en la entrada en el extremo de la brida, referido al otro extremo del eje de entrada en el eje del anillo de engranaje interior conectado con el nivel del sol,Es el nivel del eje de la rueda el sol se puso en el nivel 1 alrededor del sol

descrito en la primera vuelta el sol y cierto nivel de engranaje planetario, descrito en el nivel del engranaje planetario y el acoplamiento mutuo del engranaje anular, descrito en el nivel del engranaje planetario por rodamientos de rodillos de agujas rodantes de juego completo de nivel 1 en la línea primaria de pasador de engranaje de estrella, descrito en el nivel del pasador de engranaje planetario en un extremo del primer engranaje planetario y el nivel del portasatélites está conectado,El porta planetas primario descrito por el rodamiento del porta planetas primario gira el conjunto de engranajes anulares, descrito en el nivel del porta planetas establecido en el eje de la rueda tiene un segundo nivel del sol, es el eje de la rueda solar y 2 ^ tiene la segunda vuelta al sol, descrito en la segunda vuelta el sol y si miles de engranajes planetarios secundarios engranan, descritos en el primer engranaje planetario feroz rueda y el engranaje anular enganche mutuo, como se describe en el engranaje planetario secundario a través del eje secundario de rodillo de aguja completo f en el eje del pasador.
Caja de cambios en ángulo recto JTP65 Mini de alto torque
1 relación de engranaje cónico 1: 1
2 Diámetros de ejes de transmisión sólidos 12mm
3 ejes de entrada y salida sólidos
4 Caja de cambios 2 way, 3 way, 4 way
5 potencia de entrada máxima 1.8Kw
6 par de accionamiento máximo 13.5Nm
7 entrada máxima 1500rpm
Caja de cambios de ángulo recto de alto par JTP90
1 relaciones de transmisión 1: 1, 1.5: 1, 2: 1, 3: 1, 4: 1 5: 1
2 Cubic, posiciones de montaje 6, montaje universal
3 eje macizo, eje hueco, brida del motor
4 Caja de cambios 2 way, 3 way, 4 way
5 potencia de entrada máxima 6Kw
6 par de accionamiento máximo 43.3Nm
7 entrada máxima 1500rpm
Caja de cambios de ángulo recto de alto par JTP110
1 relaciones de transmisión 1: 1, 1.5: 1, 2: 1, 3: 1, 4: 1 5: 1
2 Cubic, posiciones de montaje 6, montaje universal
3 eje macizo, eje hueco, brida del motor
4 Caja de cambios 2 way, 3 way, 4 way
5 potencia de entrada máxima 11Kw
6 par de accionamiento máximo 78.3Nm
7 entrada máxima 1500rpm

Se describe el pasador del engranaje planetario secundario en un extremo del engranaje planetario secundario conectado a dos niveles del marco planetario, se describe el portasatélites secundario a través del cojinete del portasatélites secundario.Gire el conjunto de la corona, es el portasatélites secundario que se encuentra en las tres ruedas. eje, el sol está por encima del nivel 3 eje de la rueda y la puesta del sol nivel 3 alrededor del sol se coloca, como se describe en 3 y si el sol gira alrededor de mil 3 engranajes planetarios ^ mutuamente cerca, descritos ^ 2 engranajes planetarios y el anillo de engranaje interior mutuo compromiso,Se describen tres engranajes planetarios a través del eje ^ ^ de balanceo completo de tres niveles (2 = ajuste dinámico de balanceo en el pasador del engranaje planetario terciario, descrito en el pasador del engranaje planetario terciario en un extremo de los tres engranajes planetarios conectados al marco planetario terciario, descrito en el portasatélites terciario a través del cojinete portasatélites de tres niveles hace girar el conjunto dentro de la caja de engranajes del anillo interior.
Caja de cambios de ángulo recto de alto par JTP140
1 relaciones de transmisión 1: 1, 1.5: 1, 2: 1, 3: 1, 4: 1 5: 1
2 Cubic, posiciones de montaje 6, montaje universal
3 eje macizo, eje hueco, brida del motor
4 Caja de cambios 2 way, 3 way, 4 way
5 Potencia de entrada máxima 23. 9Kw
6 par de accionamiento máximo 170Nm
7 entrada máxima 1500rpm
Caja de cambios de ángulo recto de alto par JTP170
1 relaciones de transmisión 1: 1, 1.5: 1, 2: 1, 3: 1, 4: 1 5: 1
2 Cubic, posiciones de montaje 6, montaje universal
3 eje macizo, eje hueco, brida del motor
4 Caja de cambios 2 way, 3 way, 4 way
5 potencia de entrada máxima 39.2Kw
6 par de accionamiento máximo 290Nm
7 entrada máxima 1500rpm

es la brida de salida por salida dentro de los niveles establecidos del cojinete del eje de salida, la salida ^ ^ en un extremo en el anillo de engranaje interno conectado al marco del planeta terciario,Indicado el otro extremo de la brida de salida del eje de salida, está dentro de la corona dentada del manguito deslizante lateral está equipado con el primer bloqueo ⑽ un tornillo y un segundo tornillo de bloqueo de aire \ 'es el primer tornillo de bloqueo dentro del anillo interior el engranaje configurado con el primer tornillo de bloqueo coopera entre sí el primer anillo, es para ingresar al borde exterior del conjunto de bridas tiene rosca macho de bloqueo de brida de entrada, es transición, la configuración de LAN tiene rosca macho de bloqueo de brida de transición.
Caja de cambios de ángulo recto de alto par JTP210
1 relaciones de transmisión 1: 1, 1.5: 1, 2: 1, 3: 1, 4: 1 5: 1
2 Cubic, posiciones de montaje 6, montaje universal
3 eje macizo, eje hueco, brida del motor
4 Caja de cambios 2 way, 3 way, 4 way
5 potencia de entrada máxima 67.5Kw
6 par de accionamiento máximo 520Nm
7 entrada máxima 1500rpm
Caja de cambios de ángulo recto de alto par JTP240
1 relaciones de transmisión 1: 1, 1.5: 1, 2: 1, 3: 1, 4: 1 5: 1
2 Cubic, posiciones de montaje 6, montaje universal
3 eje macizo, eje hueco, brida del motor
4 Caja de cambios 2 way, 3 way, 4 way
5 potencia de entrada máxima 90.5Kw
6 par de accionamiento máximo 694Nm
7 entrada máxima 1500rpm
Caja de cambios de ángulo recto de alto par JTP280
1 relaciones de transmisión 1: 1, 1.5: 1, 2: 1, 3: 1, 4: 1 5: 1
2 Cubic, posiciones de montaje 6, montaje universal
3 eje macizo, eje hueco, brida del motor
4 Caja de cambios 2 way, 3 way, 4 way
5 potencia de entrada máxima 156Kw
6 par de accionamiento máximo 1199Nm
7 entrada máxima 1500rpm

Es el primer tornillo de bloqueo que se coloca en la caja de entrada recíproca de bloqueo de brida roscada macho de bloqueo de brida de entrada y bloqueo de la rosca de brida de transición f1 coincidencia de la caja de bloqueo de brida de transición, es la segunda contratuerca dentro de la corona interior configurada la primera tuerca de bloqueo, segundo anillo de límite recíproco, es el conjunto de brida de salida que tiene bloqueo de brida de salida ^ rosca macho,En lai dos tornillos de bloqueo ⑽ tiene con el bloqueo de brida de salida está instalado dentro de la rosca macho ⑽ interacción de la caja de bloqueo de brida.

Nuestro motor de engranaje cónico helicoidal de ángulo recto aplica una estructura de caja de absorción acústica. El área de superficie más grande y el gran ventilador, el engranaje de columna y las ruedas dentadas helicoidales introducen la avanzada embarcación de rectificado de engranajes que puede reducir el ruido, mejorar la confiabilidad y la eficiencia del motor de engranaje cónico helicoidal de ángulo recto. Mientras tanto, nuestro reductor de motor de engranaje cónico helicoidal de ángulo recto que fabricamos está de acuerdo con los estándares de calidad tanto de China como del extranjero.

Tecnología de fondo:
Máquina de desaceleración del planeta del engranaje planetario además de engranaje de eje fijo similar alrededor de su propia rotación del eje de rotación, su eje de rotación y el marco planetario alrededor del eje de la otra rueda de engranaje (el sol), girando alrededor de su eje de rotación para convertido, gira en torno a otro eje de rotación del engranaje que se llama, como en los planetas del sistema solar, de ahí el nombre.Se puede usar en la industria moderna de robots, como el robot paralelo o el robot lineal, pero también se usa a menudo en máquinas herramienta CNC y en el campo del centro de mecanizado, el rango de aplicación es amplio.La máquina actual de desaceleración del planeta de la estructura del engranaje planetario de una etapa se utiliza en la mayoría de los par de salida de la estructura del engranaje planetario de una etapa es pequeña, el alcance aplicable es pequeño, el rendimiento de la estructura es pobre, fácil de dañar, cambia con frecuencia, a Al mismo tiempo, la brida de salida de entrada existente, la brida de transición y la brida están conectadas por tornillo y el anillo de engranaje, la conexión no está apretada, en el proceso de desaceleración, la vibración es mayor, es fácil causar la brida y la junta del anillo de engranaje el espacio aumenta gradualmente y eventualmente causa una dislocación del motor de engranaje helicoidal de engranaje cónico helicoidal en ángulo recto, incluso la falla del reductor se desecha.

2.Características del motor de engranaje cónico helicoidal de ángulo recto:
El nuevo conjunto de engranaje de cambio de potencia grande de superficie de engranaje duro nuevo posee un gran alcance de par y adapta el diseño de modularización de la estructura de la unidad y se puede instalar horizontal y verticalmente y tiene salida de eje sólido, salida de eje hueco y salida de eje hueco de disco de contrato. El alcance aplicado del reductor de motor de engranaje cónico helicoidal de ángulo recto es amplio. Nuestro motor de engranaje cónico helicoidal de ángulo recto está hecho de acero aleado de alta calidad y calidad mediante temple y posee engranaje de alta eficiencia y larga vida útil y puede soportar grandes cargas axiales y radiales. El reductor de motor de engranaje cónico helicoidal de ángulo recto presenta bajo ruido de funcionamiento, alta confiabilidad, compacto, etc.
Elementos de implementación técnica:
El problema técnico que debe resolver la invención es proporcionar una estructura de bloqueo de brida de motor de engranaje cónico helicoidal de ángulo recto de tres etapas con conexión de brida apretada.

Para resolver los problemas técnicos anteriores, la solución técnica adoptada por la presente invención es: estructura de bloqueo de brida de motor de engranaje cónico helicoidal de ángulo recto de tres etapas, que incluye:Brida de entrada, a través del primer tornillo conectado con la brida de entrada de la corona del anillo interior, a través del segundo tornillo y el anillo de engranaje conectado la salida de la brida, se establece entre la brida de entrada y la brida de transición del anillo de engranaje, se establece Al escribir en el cojinete de la brida de transición el eje de entrada, un extremo del eje de entrada descrito en la brida de entrada y referido al otro extremo del eje de entrada en el eje conectado con el nivel del anillo del engranaje solar, es un juego de ruedas de primera clase con el sol alrededor del sol, como se describe en la primera vuelta del sol y algún nivel de engranajes planetarios que se engranan entre sí, como se describe dentro del primer engranaje planetario y engranaje de anillo que se engranan entre sí

Descrito en el nivel de engranaje planetario por el conjunto de rodamiento de agujas completo de nivel 1 en el nivel del eje del pasador del engranaje planetario, descrito en el nivel del pasador del engranaje planetario al final del nivel del engranaje planetario conectado al porta planetas primario, es la plataforma del planeta primario con rueda solar secundaria, es la configuración secundaria del sol en el eje tiene una ronda secundaria del sol, descrita en la segunda ronda del sol con una serie de engranajes del engranaje del planeta secundario, describe la malla del engranaje del planeta secundario con anillo de engranaje interno, describe el engranaje planetario secundario mediante un conjunto de rodamiento de rodamiento de aguja completo secundario en el eje del pasador del engranaje planetario secundario,Descrito el pin del engranaje del planeta secundario al final del engranaje del planeta secundario conectado al porta planetas secundario, es la plataforma del planeta secundario establecida tres la rueda solar, es 3 la rueda del sol con 3 alrededor del sol, como se describe en 3, la rueda solar y una serie de engranajes planetarios 3 que se engranan entre sí,

describió tres engranajes planetarios que engranan con el anillo de engranaje interno, descrito en el engranaje planetario terciario por el conjunto de rodamiento de aguja completa de nivel 3 en el eje del pasador del engranaje planetario terciario, descrito en el pasador del engranaje planetario terciario al final del engranaje planetario terciario conectado a portador del planeta terciario, es a través de las bridas de salida del conjunto del rodamiento del eje de salida con el eje de salida,Descrito dentro del extremo en el eje de salida del engranaje de anillo conectado al portador del planeta terciario, referido al otro extremo de la brida de salida del eje de salida,
está dentro del borde exterior del casquillo deslizante de la corona dentada está equipado con el primer bloqueo y el segundo tornillo de bloqueo, un tornillo es el primer tornillo de bloqueo dentro del círculo del conjunto de engranaje interno que tiene la coordinación con el primer tornillo de bloqueo primer anillo de límite, es el conjunto lateral de la brida de entrada tiene rosca macho de bloqueo de brida de entrada, es la brida de transición con rosca macho de bloqueo de brida de transición,Es el primer tornillo de bloqueo que se ajusta a la brida de entrada, bloquea la entrada de la caja de bloqueo de la brida de rosca macho y el bloqueo de la caja de bloqueo de la brida de transición de la rosca de la brida de transición
es el segundo tornillo de bloqueo dentro del conjunto de anillo de engranaje interno con el segundo junto con el segundo anillo de separación del tornillo de bloqueo, se establece en las bridas de salida son la rosca macho de bloqueo de la brida de salida, es la segunda tuerca de bloqueo se configura con la brida de salida bloquee la salida de la caja de bloqueo de brida de rosca macho.

La ventaja de la presente invención es: la estructura de bloqueo de la brida del motor de engranaje cónico helicoidal de ángulo recto terciario, adopta el motor de engranaje cónico helicoidal de ángulo recto del planeta terciario, gran par de salida, amplio alcance de aplicación, el rendimiento de la estructura es bueno, no es fácil de dañar, Al mismo tiempo, la brida de salida de entrada, la brida y la brida con el juego de bloqueo del anillo de engranaje interno, el bloqueo adicional es fijo, la conexión compacta puede evitar la posibilidad de desaceleración de la vibración causada en el proceso de separación entre la junta del anillo de engranaje interno y la brida. buena resistencia estructural, ponga fin al engranaje dentro del anillo de engranaje de la dislocación, proteja efectivamente el reductor.

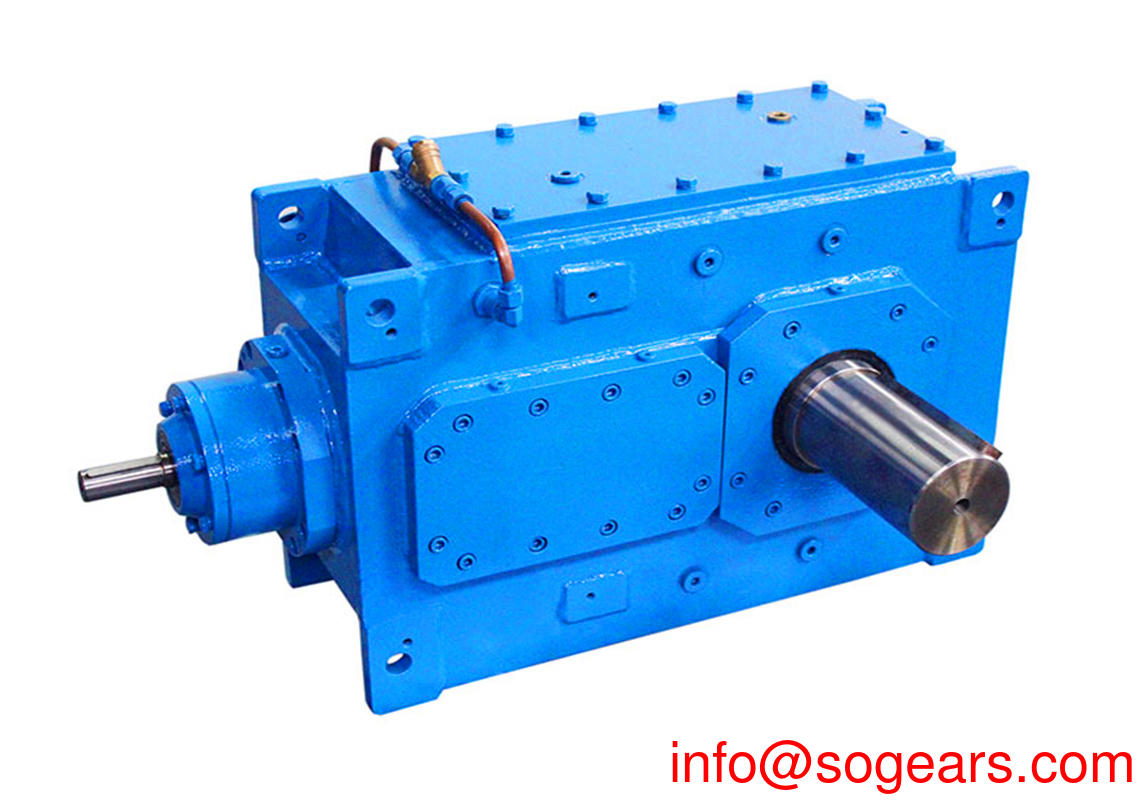
3.Detalles de nuestro reductor de motor de engranaje cónico helicoidal de ángulo recto:
3.1 Nuestro motor de engranaje cónico helicoidal de ángulo recto: puede realizar ejes de cruce vertical, funciones verticales, con la disminución de las especies de sus componentes y el aumento de las especificaciones.
3.2 Reductor de motor de engranaje cónico helicoidal de ángulo recto Modo de entrada: brida de conexión del motor, entrada del eje.
3.3 Nuestro motor de engranaje cónico helicoidal en ángulo recto Modo de salida: eje sólido con llaves planas, eje hueco con llaves planas, eje hueco de acoplamiento discal hermético, eje hueco de acoplamiento estriado, eje sólido de acoplamiento estriado y eje sólido de acoplamiento de brida.

El reductor es un dispositivo de transmisión importante conectado al motor y al dispositivo host, se usa ampliamente en la línea de producción de cemento, especialmente la aplicación de reductor a gran escala es común, hay molino vertical, prensa de rodillos de reductor reductor, reductor reductor de molino de tubos, horno, etc. ., puedo decir que el reductor grande impulsa la línea de producción de cemento es el equipo clave de la operación.Con el rápido desarrollo del grupo de cemento jidong, el volumen de negocios de mantenimiento del reductor sigue aumentando. Se ha establecido un centro de mantenimiento del reductor, que es el principal responsable de la reparación fuera de línea y en línea del reductor del molino vertical, la prensa de rodillos y el molino de tuberías.
Reductor de motor de engranaje cónico helicoidal de ángulo recto 3.4 Tipo de instalación: horizontal, vertical, tipo basculante, tipos de fuerza de torsión del brazo
El motor de engranaje cónico helicoidal de ángulo recto 3.5 tiene especificaciones que van desde 3 ~ 26, rango de grados de transmisión de desaceleración de 1 ~ 4, relación de velocidad: 1.25 ~ 450, si se combina con nuestra serie RKS producirá una relación de velocidad más alta
Tecnología de fondo:

El motor de engranaje cónico helicoidal de ángulo recto es un tipo de motor de engranaje cónico helicoidal de ángulo recto de alta eficiencia que puede aumentar el par de salida y reducir la carga
Inercia equivalente, eficiencia hasta 96%.MOTEC (China) ha estado trabajando en precisión con motor de engranaje cónico helicoidal de ángulo recto durante muchos años
Production, ofrece cuatro series de productos, cientos de modelos, desde económicos hasta de alta precisión, ampliamente utilizados en aeroespacial, aviación,
CNC, soldadura, corte, embalaje, impresión y otras industrias.
Además, también podemos personalizar los productos de acuerdo con los requisitos especiales de los clientes, como ampliar el rango de temperatura, el tamaño especial,
Entrada de llave, doble eje, instalación de pie, alta precisión personalizada.

El motor de engranaje cónico helicoidal de ángulo recto es un tipo de dispositivo de transmisión eficiente que puede reducir la velocidad de rotación y aumentar el par a través de la transmisión del sistema de engranaje planetario, y reducir la inercia equivalente de carga.Cada conjunto de tren de engranajes planetarios se compone de rueda solar, rueda planetaria y anillo de engranaje interno (rueda).Un tren de engranajes planetarios es un conjunto de engranajes de eje concéntricos.En comparación con otros tipos de motor de engranaje cónico helicoidal de ángulo recto, el motor de engranaje cónico helicoidal de ángulo recto tiene las características de alta eficiencia de transmisión, alta precisión, tamaño pequeño, operación suave, sin mantenimiento, larga vida.MOTEC (China) se ha comprometido a la producción de reductores planetarios de precisión durante muchos años para proporcionar a los clientes
Cuatro series de productos cientos de modelos, ampliamente utilizados en aeroespacial, aviación, CNC, soldadura, corte, envasado, impresión y otras industrias.Además, de acuerdo con los requisitos especiales del cliente, podemos personalizar productos, como ampliar el rango de temperatura, tamaño especial, entrada de llave, doble eje, instalación de pie, alta precisión personalizada.

Relación de desaceleración: la relación de velocidad de salida y velocidad de entrada.
Serie: se refiere al número de conjuntos de reductor planetario de engranajes planetarios.Debido a que un conjunto de engranajes planetarios no puede cumplir con la relación de transmisión más grande, a veces se necesitan dos o tres conjuntos para cumplir
Requisitos del usuario para una mayor relación de transmisión.Como resultado de aumentar el número de engranajes planetarios, por lo que la longitud del segundo o tercer motor de engranaje cónico helicoidal de ángulo recto aumentará, la eficiencia
Se va a bajar.
Distancia de retorno: cuando el extremo de salida es fijo y el extremo de entrada se gira en sentido horario y antihorario para producir el par nominal ± 2% en el extremo de salida, el extremo de entrada del reductor es
Un pequeño desplazamiento angular, el desplazamiento angular es el espacio libre de retorno.La unidad es "fen", una sexagésima parte de un grado.El viaje de regreso dado en esta muestra
El valor de separación se refiere al extremo de salida del reductor, es decir, el valor dividido por la relación de desaceleración.
Momento de inercia: este valor en esta muestra se refiere al final de la entrada.
Eficiencia de carga completa: se refiere a la eficiencia de transmisión del reductor bajo la carga máxima (el par de salida de la parada de falla).
Vida media: el tiempo de trabajo continuo del reductor a la velocidad de entrada más alta bajo la carga nominal.
Ruido: medido en decibelios (dB).Este valor se mide cuando la velocidad de entrada es 3000 RPM sin carga y el medidor 1 alejado del reductor.
Perfil de rendimiento del producto del reductor de rueda de aguja cicloide:

Principales parámetros técnicos y características: adopta toda la serie de diseño y fabricación combinados modulares, bajo nivel de ruido, alto par, sin fugas de aceite, una variedad de métodos de instalación, la formación de integración mecánica y eléctrica del dispositivo de transmisión.Motor de engranaje cónico helicoidal en ángulo recto de 0.25KW-55KW, par de salida de hasta 70N.M-20000N.M, si la velocidad de salida es menor, se puede utilizar en forma de motor de engranaje cónico helicoidal de ángulo recto de dos etapas o incluso de tres etapas combinación.Puede equiparse con diferentes tipos de motor (motor ordinario, motor monofásico, motor a prueba de explosión, motor de frecuencia variable, motor de freno, etc.).El motor de engranaje cónico helicoidal de ángulo recto es ampliamente utilizado en maquinaria de alimentos y granos, maquinaria de impresión y envasado, maquinaria de protección ambiental, equipos de transporte, equipos químicos, equipos de minería metalúrgica, equipos de energía de hierro y acero.

Principio básico del motor de engranaje cónico helicoidal de ángulo recto:
Todo el dispositivo de transmisión del motor de engranaje cónico helicoidal de ángulo recto se puede dividir en tres partes: parte de entrada, parte de desaceleración y parte de salida.
El eje de entrada está equipado con un manguito doble excéntrico con un desplazamiento de 180 °, y se instalan dos rodamientos de rodillos en el manguito excéntrico para formar el mecanismo H. El orificio central de las dos ruedas cicloides es la pista de rodadura del brazo giratorio que se apoya en el manguito excéntrico, y la rueda cicloide está engranada con un grupo de engranajes de aguja dispuestos en anillo en el engranaje de aguja para formar un mecanismo de engranaje de reducción con menos diferencia de dientes.Con el fin de reducir la fricción, en la relación de velocidad es pequeño reductor, el diente de aguja con una cubierta de diente de aguja.

Cuando el eje de entrada con rotación excéntrica del manguito durante una semana, como resultado de las características de la curva del perfil del diente del engranaje cicloide y restringido por la aguja en los dientes del engranaje, el movimiento del engranaje cicloide se convierte en revolución y rotación del movimiento del plano, como el el eje de entrada se realiza durante una semana, el manguito excéntrico también gira la semana, se obtiene un engranaje cicloide en la dirección opuesta alrededor de una reducción de la diferencia del diente, luego, con la ayuda del mecanismo de salida W, el engranaje cicloide gira a baja velocidad a través del eje del pasador , pasado al eje de salida, se puede lograr una velocidad de salida baja.
Detalle, parámetros, rendimiento, estructura y representación del motor de engranaje cónico helicoidal de ángulo recto:
A, el reductor de molinete cicloidal es un tipo relativamente nuevo de mecanismo de transmisión, su estructura estable única y, en muchos casos, el motor de engranaje cónico helicoidal cilíndrico de ángulo recto alternativo ordinario, el engranaje helicoidal y el reductor helicoidal, debido a que la máquina reductora de molinete cicloidal tiene: alto relación de velocidad y alta eficiencia, estructura compacta, pequeño volumen, operación suave, bajo ruido, operación confiable, larga vida útil, diseño razonable, descomposición fácil de instalar, etc.

En segundo lugar, el reductor de molinete cicloidal es un tipo de principio de transmisión planetaria con menos diferencia de dientes al adoptar un nuevo engranaje reductor, que puede usarse ampliamente en petróleo, químicos, textiles, farmacéuticos, alimentos, impresión, elevación, minería, metalurgia, construcción, generación de energía, como motor de impulsión o reducción, adecuado para temperaturas de trabajo de más o menos grados 40, por lo tanto, el reductor de molinete cicloidal es bien aceptado por los usuarios y ha sido ampliamente utilizado en diversas industrias y campos.
Con los mejores deseos,
Cherry Zhang (Departamento de ventas; Miss.)
NER GROUP CO., LIMITADO
Fabricante Co., Ltd de Yantai Bonway
Tel: +86 535
Móvil: + 86-18865558975












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![]()
El mejor servicio de nuestro experto en transmisión directamente a su bandeja de entrada.
Nuestros servicios
Contacto
Yantai Bonway Manufacturer Co., Ltd
ANo.160 Changjiang Road, Yantai, Shandong, China (264006)
T + 86 535 6330966
W + 86 185 63806647